Evaluations-Framework
Uebersicht
Abschnitt betitelt „Uebersicht“StarVLA standardisiert die Inferenz-Pipeline fuer Evaluationen an echten Robotern oder in Simulationen, indem Daten ueber WebSocket (ein Netzwerkprotokoll, das bidirektionale Echtzeitkommunikation zwischen Client und Server ermoeglicht) getunnelt werden. Dies ermoeglicht die Integration neuer Modelle in bestehende Evaluationsumgebungen mit minimalen Aenderungen.
Architektur
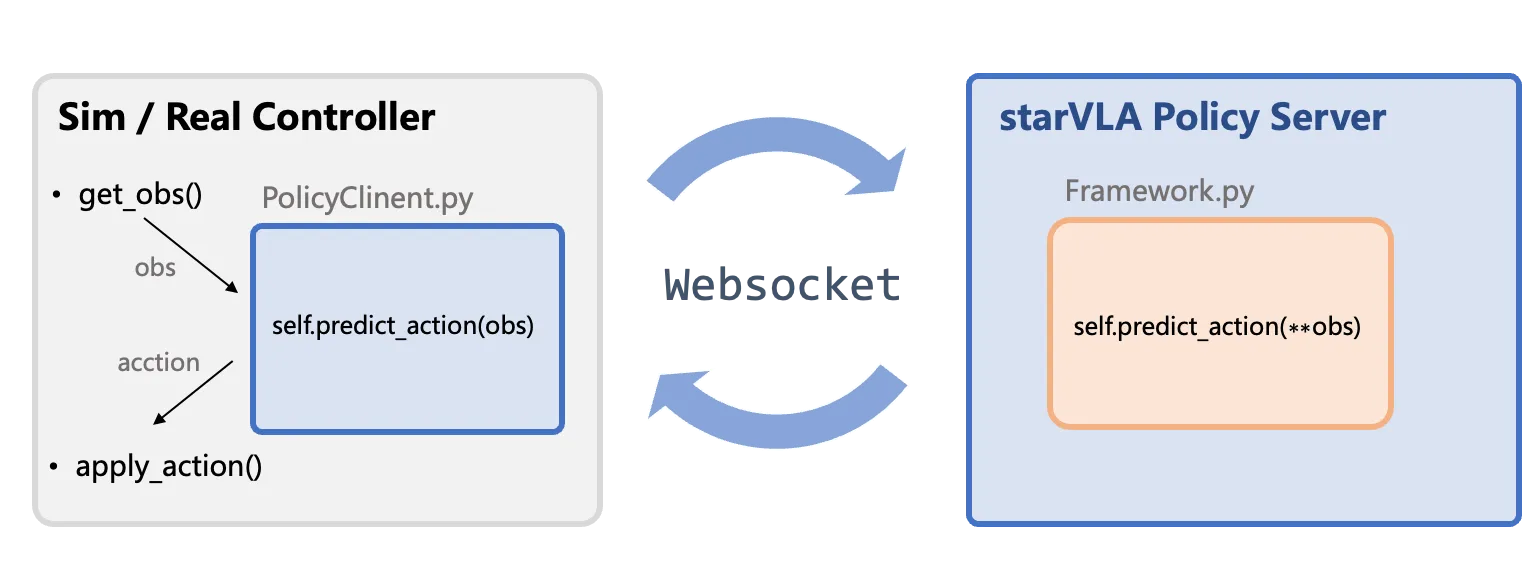
Abschnitt betitelt „Architektur“Das StarVLA-Framework verwendet eine Client-Server-Architektur, um die Evaluations-/Deployment-Umgebung (Client) vom Policy-Server (Modellinferenz) zu trennen.
- Policy-Server: Laedt das Modell, empfaengt Beobachtungen und gibt normalisierte Aktionen aus.
- Client: Kommuniziert mit dem Simulator oder echten Roboter und verarbeitet die Modellausgaben nach:
- Unnormalize: Wandelt die normalisierten Aktionen des Modells [-1, 1] zurueck in physikalische Groessen (z. B. Gelenkwinkel).
- Delta-zu-Absolut: Falls das Modell inkrementelle Aktionen relativ zur aktuellen Position ausgibt, werden diese zum aktuellen Zustand addiert, um absolute Zielpositionen zu erhalten.
- Action Ensemble: Das Modell kann mehrere zukuenftige Schritte gleichzeitig vorhersagen; ueberlappende Vorhersagen aufeinanderfolgender Aufrufe werden gewichtet gemittelt fuer eine glattere Ausfuehrung.
Komponentenbeschreibung
Abschnitt betitelt „Komponentenbeschreibung“| Komponente | Beschreibung |
|---|---|
| Sim / Real Controller | Extern zu StarVLA: Enthaelt die Kernschleife der Evaluationsumgebung oder des Roboter-Controllers, zustaendig fuer Beobachtungserfassung (get_obs()) und Aktionsausfuehrung (apply_action()). |
| PolicyClient.py & WebSocket & PolicyServer | Standard-Kommunikationsfluss: Clientseitige Wrapper-Schicht, zustaendig fuer Datenuebertragung (Tunneling) und die Verbindung zwischen Umgebung und Server. |
| Framework.py | Modell-Inferenzkern: Enthaelt die benutzerdefinierte Modellinferenzfunktion (Framework.predict_action), die die Hauptlogik fuer die Aktionsgenerierung darstellt. |
Datenprotokoll
Abschnitt betitelt „Datenprotokoll“Minimales Pseudocode-Beispiel (evaluationsseitiger Client):
# Import-Pfad: from deployment.policy_client.policy_client import WebsocketClientPolicyimport WebsocketClientPolicy
client = WebsocketClientPolicy( host="127.0.0.1", port=10092)
while True: images = capture_multiview() # returns List[np.ndarray] lang = get_instruction() # may come from task scripts example = { "image": images, "lang": lang, }
result = client.predict_action(example) # --> forwarded to framework.predict_action action = result["normalized_actions"][0] # take the first item in the batch apply_action(action)Fuer den Modell-Server starten Sie ihn einfach mit:
#!/bin/bashexport PYTHONPATH=$(pwd):${PYTHONPATH}
# Verweisen Sie auf Ihr StarVLA-Conda-Python# $(which python) waehlt automatisch das Python aus Ihrer aktuell aktivierten Conda-Umgebung# Stellen Sie sicher, dass Sie `conda activate starVLA` ausgefuehrt haben, bevor Sie dieses Skript ausfuehrenexport star_vla_python=$(which python)your_ckpt=results/Checkpoints/xxx.pt # Ersetzen Sie durch Ihren Checkpoint-Pfadgpu_id=0port=5694
# export DEBUG=trueCUDA_VISIBLE_DEVICES=$gpu_id ${star_vla_python} deployment/model_server/server_policy.py \ --ckpt_path ${your_ckpt} \ --port ${port} \ --use_bf16Hinweise
Abschnitt betitelt „Hinweise“- Stellen Sie sicher, dass jedes Feld in
exampleJSON-serialisierbar oder konvertierbar ist (Listen, Floats, Ints, Strings); konvertieren Sie benutzerdefinierte Objekte explizit. - Bilder muessen als
np.ndarraygesendet werden. Fuehren SiePIL.Image -> np.ndarrayvor der Uebertragung durch und konvertieren Sie auf dem Server bei Bedarf zurueck mitto_pil_preserve(from starVLA.model.utils import to_pil_preserve). - Halten Sie Hilfsmetadaten (Episoden-IDs, Zeitstempel usw.) in dedizierten Schluesseln, damit das Framework diese weiterleiten oder protokollieren kann, ohne Kollisionen.
PolicyClient-Interface-Design
Abschnitt betitelt „PolicyClient-Interface-Design“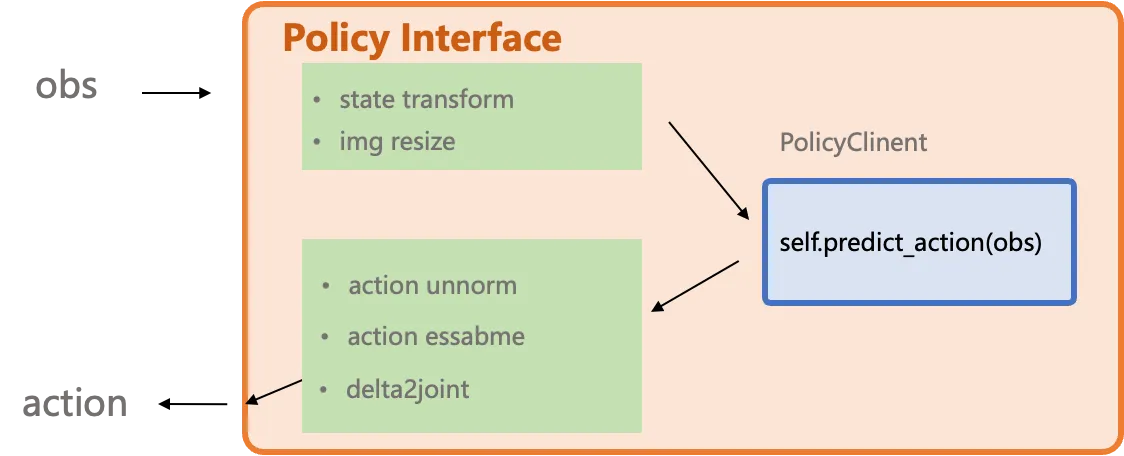
Das *2model_interface.py-Interface ist dafuer konzipiert, alle Variationen zu kapseln und zu abstrahieren, die aus der Simulations- oder realen Umgebung stammen. Es unterstuetzt auch benutzerdefinierte Controller, wie die Umwandlung von Delta-Aktionen in absolute Gelenkpositionen. Sie koennen sich an den Implementierungen fuer verschiedene Benchmarks in examples orientieren, um Ihr eigenes Deployment aufzubauen.
F: Warum enthalten Beispiele Dateien wie model2{bench}_client.py?
A: Sie kapseln benchmarkspezifische Anpassungen, z. B. Action Ensembling, Umwandlung von Delta-Aktionen in absolute Aktionen oder die Ueberbrueckung von Simulator-Eigenheiten, sodass der Modell-Server generisch bleiben kann.
F: Warum erwartet das Modell PIL-Bilder, waehrend der Transport ndarray verwendet?
A: WebSocket-Payloads koennen PIL-Objekte nicht direkt serialisieren. Konvertieren Sie clientseitig zu np.ndarray und stellen Sie innerhalb des Frameworks auf PIL zurueck, falls das Modell dies erfordert.
Feedback zu umgebungsspezifischen Anforderungen ist ueber Issues willkommen.