评测框架
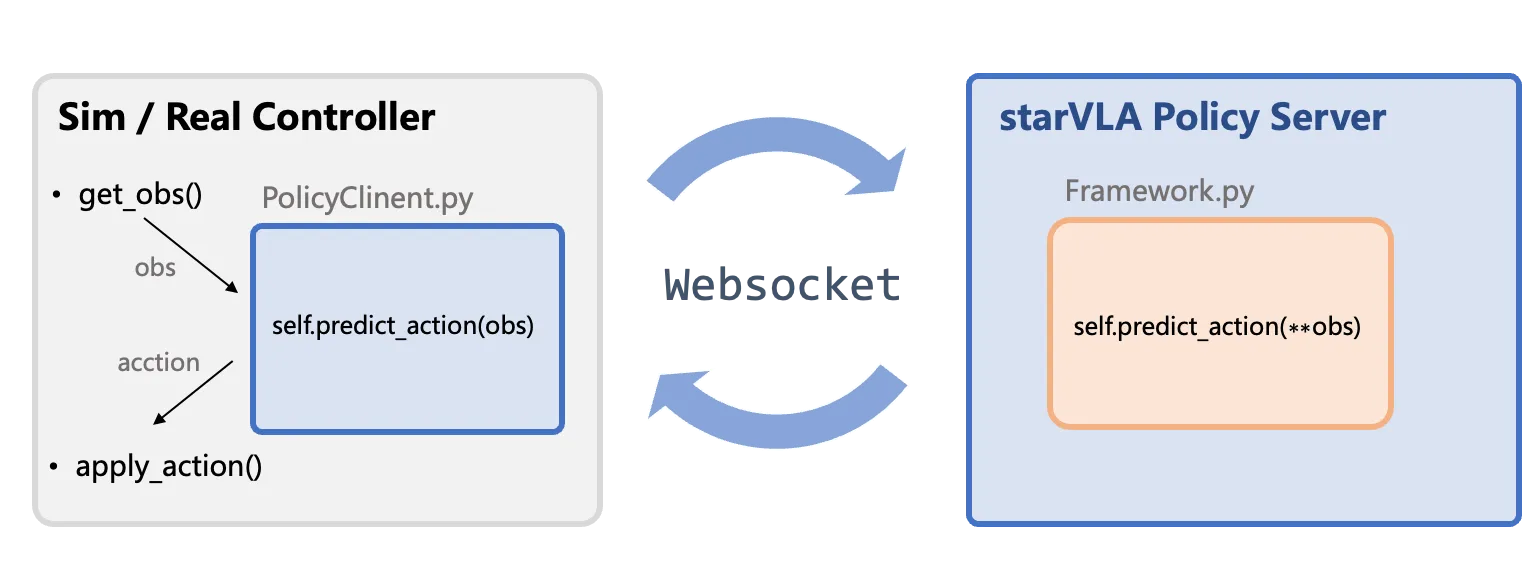
StarVLA 通过 WebSocket(一种网络通信协议,允许客户端和服务器之间双向实时通信)隧道传输数据,标准化了真实机器人或仿真评测的推理流程,使新模型能够以最小的改动集成到现有评测环境中。
StarVLA 框架使用客户端-服务器架构,将评测/部署环境(客户端)与策略服务器(模型推理)分离。
- 策略服务器:只负责加载模型、接收观测数据、输出归一化动作。
- 客户端:负责与仿真器/真机交互,并对模型输出进行后处理,包括:
- Unnormalize(反归一化):将模型输出的 [-1, 1] 归一化动作恢复为实际物理量(如关节角度)。
- Delta-to-Absolute(增量转绝对):如果模型输出的是相对当前位置的增量动作,需要加上当前状态得到绝对目标位置。
- Action Ensemble(动作集成):模型可能一次预测多步动作,将多次预测的重叠部分进行加权平均以提高平滑性。
| 组件 | 描述 |
|---|---|
| Sim / Real Controller | StarVLA 外部:包含评测环境或机器人控制器的核心循环,处理观测收集(get_obs())和动作执行(apply_action())。 |
| PolicyClient.py & WebSocket & PolicyServer | 标准通信流程:客户端包装器,负责数据传输(隧道)并将环境与服务器对接。 |
| Framework.py | 模型推理核心:包含用户定义的模型推理函数(Framework.predict_action),是生成动作的主要逻辑。 |
最小化伪代码示例(评测端客户端):
# 导入路径:from deployment.policy_client.policy_client import WebsocketClientPolicyimport WebsocketClientPolicy
client = WebsocketClientPolicy( host="127.0.0.1", port=10092)
while True: images = capture_multiview() # 返回 List[np.ndarray] lang = get_instruction() # 可能来自任务脚本 example = { "image": images, "lang": lang, }
result = client.predict_action(example) # --> 转发到 framework.predict_action action = result["normalized_actions"][0] # 取批次中的第一项 apply_action(action)而对于 Model Server 只需要通过:
#!/bin/bashexport PYTHONPATH=$(pwd):${PYTHONPATH}
# 指向你的 StarVLA conda 环境中的 Python# $(which python) 会自动获取当前激活的 conda 环境中的 Python 路径# 如果你使用了多个 conda 环境,请确保已 `conda activate starVLA` 后再运行export star_vla_python=$(which python)your_ckpt=results/Checkpoints/xxx.pt # 替换为你的 checkpoint 路径gpu_id=0port=5694
# export DEBUG=trueCUDA_VISIBLE_DEVICES=$gpu_id ${star_vla_python} deployment/model_server/server_policy.py \ --ckpt_path ${your_ckpt} \ --port ${port} \ --use_bf16启动即可。
- 确保
example中的每个字段都是 JSON 可序列化或可转换的(列表、浮点数、整数、字符串);需要显式转换自定义对象。 - 图像必须以
np.ndarray发送。在传输前执行PIL.Image -> np.ndarray转换,如果模型需要,在服务器端使用to_pil_preserve(from starVLA.model.utils import to_pil_preserve)转换回 PIL。 - 将辅助元数据(episode ID、时间戳等)保存在专用键中,以便框架可以转发或记录它们而不会产生冲突。
PolicyClient 接口设计
Section titled “PolicyClient 接口设计”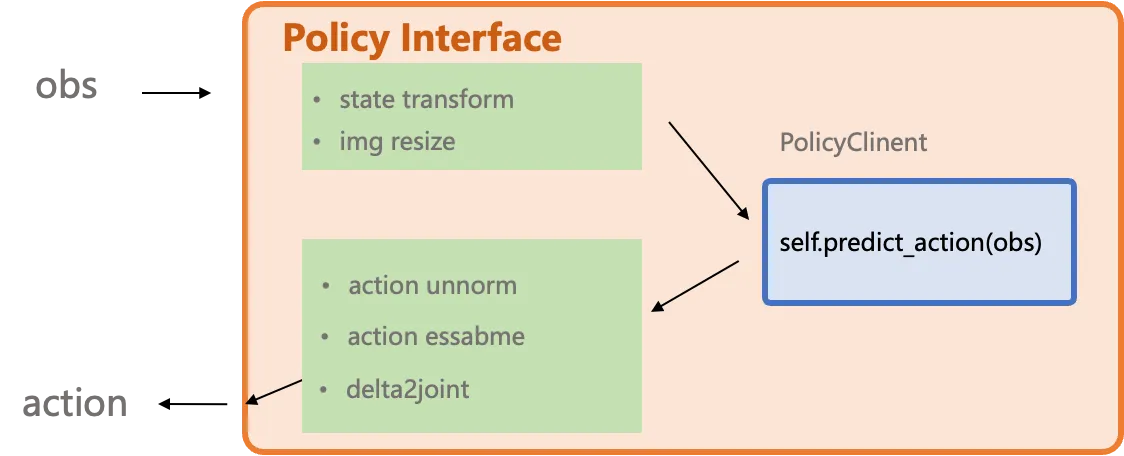
*2model_interface.py 接口旨在封装和抽象来自仿真或真实环境的任何变化。它还支持用户定义的控制器,例如将增量动作转换为绝对关节位置。你可以参考 examples 里面对于不同 Benchmark 的实现,来实现你的部署。
Q:为什么示例中包含 model2{bench}_client.py 这样的文件?
A:它们封装了基准测试特定的对齐,例如动作集成、将增量动作转换为绝对动作、或桥接仿真器的特殊行为,使模型服务器可以保持通用。
Q:为什么模型期望 PIL 图像而传输使用 ndarray?
A:WebSocket 有效负载无法直接序列化 PIL 对象。在客户端转换为 np.ndarray,如果模型需要,在框架内部恢复为 PIL。
欢迎通过 issues 提供关于环境特定需求的反馈。