プロジェクト概要
StarVLAは、Vision-Language Model(VLM)をVision-Language-Action(VLA)モデルに変換するための、レゴのようなモジュラーコードベースです。
簡単に言うと、VLMは画像とテキストを理解するモデルであり、VLAはさらにロボットのアクションを出力できるモデルです。StarVLAは、データ準備からモデルトレーニング、シミュレーション評価まで、この変換をエンドツーエンドで処理します。各コンポーネントは個別にデバッグ可能で、プラグアンドプレイです。
VLAフレームワーク
Section titled “VLAフレームワーク”StarVLAは、Qwen-VLベースのStarVLAモデルファミリーを4つの異なるアクション出力戦略で公式に提供しています:
| フレームワーク | アクション出力 | 参考 |
|---|---|---|
| Qwen-FAST | アクションを離散トークンにエンコードし、言語モデルで予測 | pi0-FAST |
| Qwen-OFT | VLM出力後のMLPヘッドで、連続的なアクション値を直接回帰 | OpenVLA-OFT |
| Qwen-PI | Flow-Matching(拡散ベース)手法で連続アクションを生成 | pi0 |
| Qwen-GR00T | デュアルシステム:高レベル推論用VLM + 高速アクション生成用DiT | GR00T-N1 |
モジュラーの意味: Frameworkでモデル構造を定義するだけで、共通のTrainer、Dataloader、評価・デプロイパイプラインを再利用できます。トレーニングループや評価コードを書き直す必要はありません。
トレーニング戦略
Section titled “トレーニング戦略”- シングルタスク模倣学習(人間のデモンストレーションから学習 — 報酬関数は不要)。
- マルチモーダル・マルチタスク共同トレーニング(複数のデータソースで同時にトレーニングし、モデルが以前学習した能力を忘れることを防止)。
- [計画中] 強化学習への適応。
シミュレーションベンチマーク
Section titled “シミュレーションベンチマーク”サポート済みまたは計画中のベンチマーク:
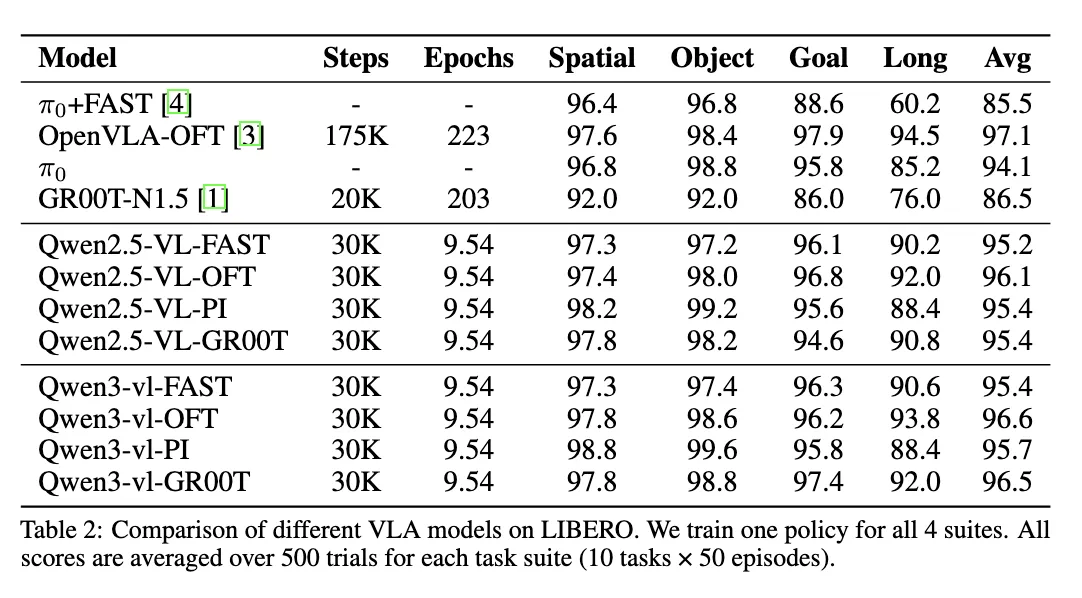
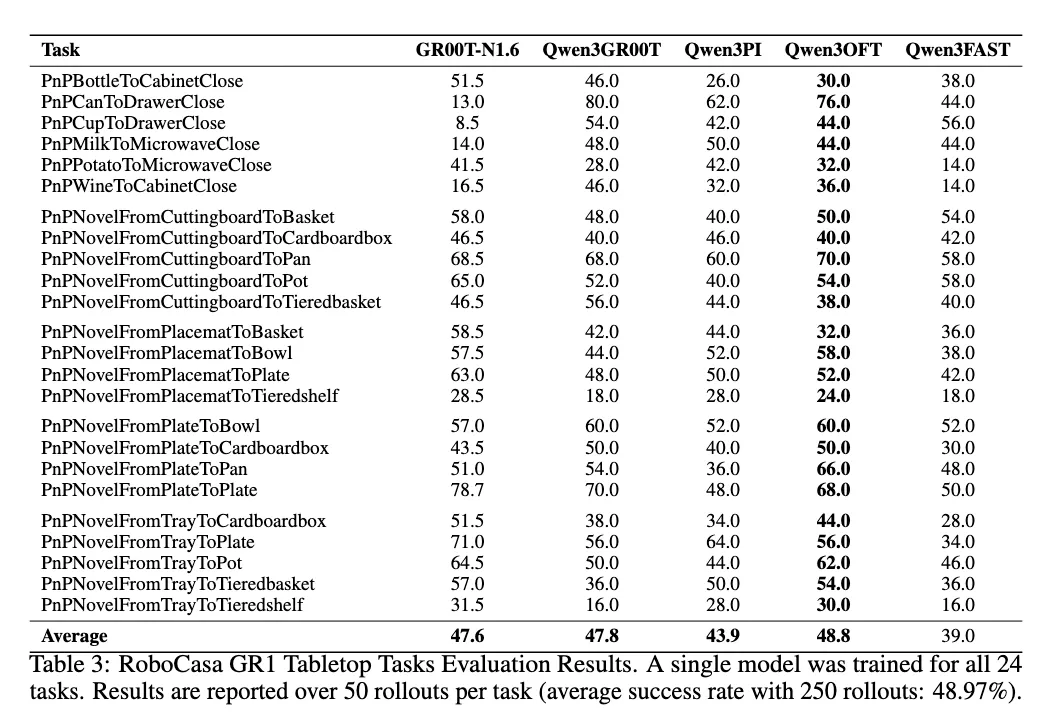
- サポート済み: SimplerEnv, LIBERO, RoboCasa, RoboTwin, CALVIN, BEHAVIOR。
- 計画中: SO101, RLBench。
主なベンチマーク結果
Section titled “主なベンチマーク結果”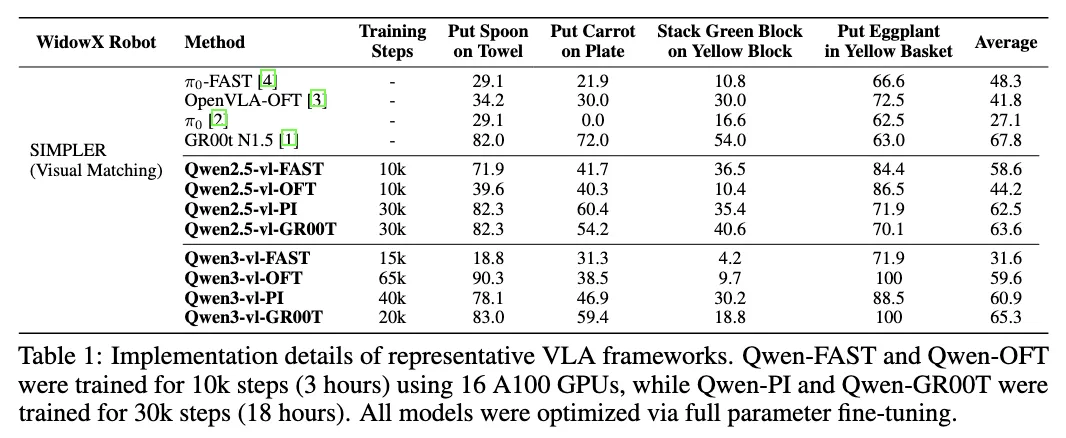
結果とレポート
Section titled “結果とレポート”- 技術レポート: StarVLA: A Lego-like Codebase for Vision-Language-Action Model Developing(arXiv:2604.05014)。
- Overleafライブレポート: 最新のベンチマークデータと分析を含む、継続的に更新される実験レポートPDF — https://www.overleaf.com/read/qqtwrnprctkf#d5bdce
次のステップ
Section titled “次のステップ”コミュニティとリンク
Section titled “コミュニティとリンク”- Hugging Face: https://huggingface.co/StarVLA
- WeChatグループ: https://github.com/starVLA/starVLA/issues/64#issuecomment-3715403845
StarVLAベースのプロジェクト:
- NeuroVLA: A Brain-like Embodied Intelligence for Fluid and Fast Reflexive Robotics Control
- PhysBrain: Human Egocentric Data as a Bridge from Vision Language Models to Physical Intelligence
- TwinBrainVLA: Unleashing the Potential of Generalist VLMs for Embodied Tasks via Asymmetric Mixture-of-Transformers
- LangForce: Bayesian Decomposition of Vision Language Action Models via Latent Action Queries
最新情報
- 2025/12/25: Behavior-1K、RoboTwin 2.0、CALVINのパイプラインが確立。コミュニティとベースラインの共有を予定。
- 2025/12/25: RoboCasa評価サポートをリリース。事前学習なしでSOTAを達成。RoboCasaドキュメントを参照してください。
- 2025/12/15: リリース回帰チェック完了。継続的な更新はデイリー開発ログを参照。
- 2025/12/09: VLM、VLA、VLA+VLM共同トレーニングのオープンソーストレーニング。VLM共同トレーニングドキュメントを参照。
- 2025/11/12: リソース制約のあるVLMトレーニング(単一A100)向けにFlorence-2サポートを追加。ワークフローについてはレゴ式設計を参照。
- 2025/10/30: LIBEROのトレーニングおよび評価ガイドをリリース。
- 2025/10/25: コミュニティのフィードバックに基づき、スクリプトリンクとパッケージングを整備。