평가 프레임워크
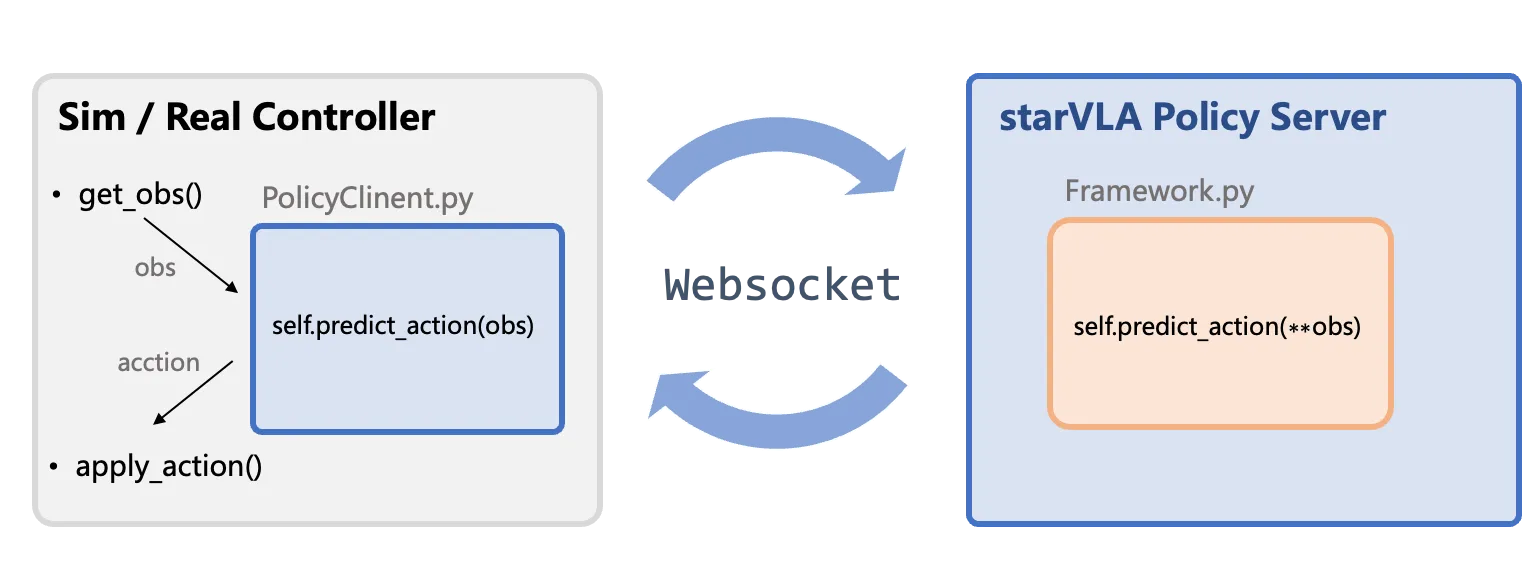
StarVLA는 WebSocket(클라이언트와 서버 간 양방향 실시간 통신을 가능하게 하는 네트워크 프로토콜)을 통해 데이터를 터널링하여 실제 로봇 또는 시뮬레이션 평가를 위한 추론 파이프라인을 표준화합니다. 이를 통해 새로운 모델을 최소한의 변경으로 기존 평가 환경에 통합할 수 있습니다.
아키텍처
섹션 제목: “아키텍처”StarVLA 프레임워크는 클라이언트-서버 아키텍처를 사용하여 평가/배포 환경(클라이언트)과 정책 서버(모델 추론)를 분리합니다.
- 정책 서버: 모델을 로드하고, 관찰을 수신하며, 정규화된 액션을 출력합니다.
- 클라이언트: 시뮬레이터 또는 실제 로봇과 인터페이스하며, 모델 출력을 후처리합니다:
- 역정규화: 모델의 [-1, 1] 정규화된 액션을 물리량(예: 관절 각도)으로 변환합니다.
- 델타-절대값 변환: 모델이 현재 위치 대비 증분 액션을 출력하는 경우, 현재 상태에 더하여 절대 목표 위치를 구합니다.
- 액션 앙상블: 모델이 여러 미래 스텝을 한 번에 예측할 수 있으며, 연속 호출에서 겹치는 예측을 가중 평균하여 더 부드럽게 실행합니다.
컴포넌트 설명
섹션 제목: “컴포넌트 설명”| 컴포넌트 | 설명 |
|---|---|
| Sim / Real Controller | StarVLA 외부: 평가 환경이나 로봇 컨트롤러의 핵심 루프를 포함하며, 관찰 수집(get_obs())과 액션 실행(apply_action())을 처리합니다. |
| PolicyClient.py & WebSocket & PolicyServer | 표준 통신 흐름: 데이터 전송(터널링)을 담당하고 환경과 서버를 연결하는 클라이언트 측 래퍼입니다. |
| Framework.py | 모델 추론 핵심: 사용자 정의 모델 추론 함수(Framework.predict_action)를 포함하며, 액션 생성의 주요 로직입니다. |
데이터 프로토콜
섹션 제목: “데이터 프로토콜”최소 의사 코드 예시(평가 측 클라이언트):
# 임포트 경로: from deployment.policy_client.policy_client import WebsocketClientPolicyimport WebsocketClientPolicy
client = WebsocketClientPolicy( host="127.0.0.1", port=10092)
while True: images = capture_multiview() # returns List[np.ndarray] lang = get_instruction() # may come from task scripts example = { "image": images, "lang": lang, }
result = client.predict_action(example) # --> forwarded to framework.predict_action action = result["normalized_actions"][0] # take the first item in the batch apply_action(action)모델 서버의 경우, 다음과 같이 시작합니다:
#!/bin/bashexport PYTHONPATH=$(pwd):${PYTHONPATH}
# StarVLA conda Python을 지정합니다# $(which python)은 현재 활성화된 conda 환경의 Python을 자동으로 가져옵니다# 이 스크립트를 실행하기 전에 `conda activate starVLA`를 실행했는지 확인하세요export star_vla_python=$(which python)your_ckpt=results/Checkpoints/xxx.pt # 체크포인트 경로로 교체하세요gpu_id=0port=5694
# export DEBUG=trueCUDA_VISIBLE_DEVICES=$gpu_id ${star_vla_python} deployment/model_server/server_policy.py \ --ckpt_path ${your_ckpt} \ --port ${port} \ --use_bf16참고사항
섹션 제목: “참고사항”example의 모든 필드가 JSON 직렬화 가능하거나 변환 가능한지 확인하세요(리스트, float, int, 문자열). 커스텀 객체는 명시적으로 변환하세요.- 이미지는
np.ndarray로 전송해야 합니다. 전송 전에PIL.Image -> np.ndarray변환을 수행하고, 서버에서 필요한 경우to_pil_preserve(from starVLA.model.utils import to_pil_preserve)를 사용하여 다시 변환하세요. - 보조 메타데이터(에피소드 ID, 타임스탬프 등)는 전용 키에 보관하여 프레임워크가 충돌 없이 전달하거나 로깅할 수 있도록 하세요.
PolicyClient 인터페이스 설계
섹션 제목: “PolicyClient 인터페이스 설계”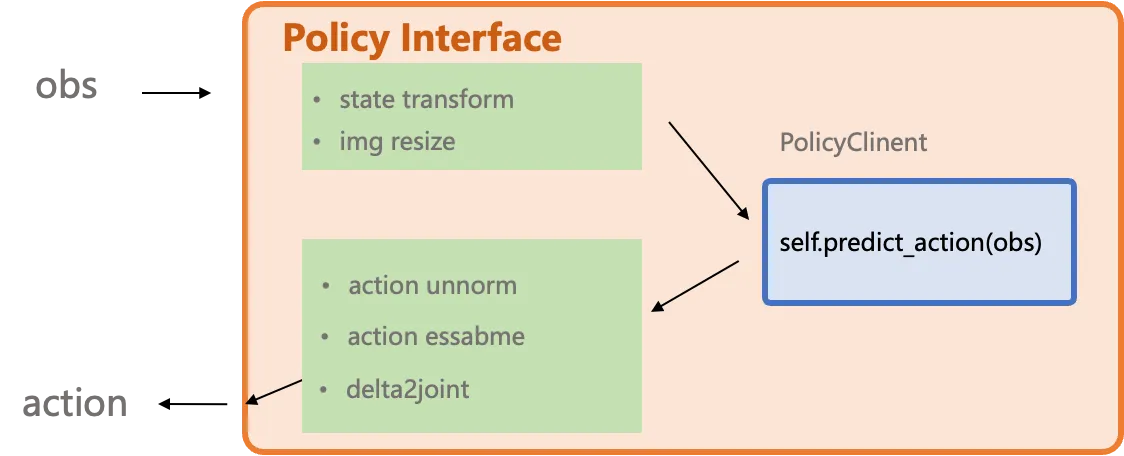
*2model_interface.py 인터페이스는 시뮬레이션 또는 실제 환경에서 발생하는 모든 변형을 래핑하고 추상화하도록 설계되었습니다. 또한 델타 액션을 절대 관절 위치로 변환하는 등 사용자 정의 컨트롤러도 지원합니다. examples에 있는 다양한 벤치마크의 구현을 참고하여 자체 배포 환경을 구축할 수 있습니다.
자주 묻는 질문
섹션 제목: “자주 묻는 질문”Q: 왜 examples에 model2{bench}_client.py 같은 파일이 있나요?
A: 이 파일들은 벤치마크별 맞춤 처리를 캡슐화합니다. 예를 들어 액션 앙상블, 델타 액션을 절대 액션으로 변환, 시뮬레이터 특이점 처리 등이 포함되어 있어 모델 서버가 범용으로 유지될 수 있습니다.
Q: 왜 모델은 PIL 이미지를 기대하지만 전송에는 ndarray를 사용하나요?
A: WebSocket 페이로드는 PIL 객체를 직접 직렬화할 수 없습니다. 클라이언트 측에서 np.ndarray로 변환하고, 모델이 필요한 경우 프레임워크 내부에서 PIL로 복원하세요.
환경별 요구사항에 대한 피드백은 이슈를 통해 환영합니다.