프로젝트 개요
StarVLA는 **Vision-Language Model(VLM)**을 Vision-Language-Action(VLA) 모델로 개발하기 위한 레고 블록 방식의 모듈형 코드베이스입니다.
요약하면: VLM은 이미지와 텍스트를 이해하고, VLA는 여기에 로봇 동작 출력을 추가합니다. StarVLA는 데이터 준비, 모델 학습, 시뮬레이션 평가에 이르는 전 과정을 처리하며, 각 구성 요소는 독립적으로 디버깅하고 플러그 앤 플레이 방식으로 교체할 수 있습니다.
주요 기능
섹션 제목: “주요 기능”VLA 프레임워크
섹션 제목: “VLA 프레임워크”StarVLA는 Qwen-VL 기반의 StarVLA Model Family를 공식적으로 제공하며, 4가지 액션 출력 전략을 지원합니다:
| 프레임워크 | 액션 출력 방식 | 참조 |
|---|---|---|
| Qwen-FAST | 액션을 이산 토큰으로 인코딩하여 언어 모델이 예측 | pi0-FAST |
| Qwen-OFT | VLM 출력 이후 MLP 헤드로 연속 액션 값을 직접 회귀 | OpenVLA-OFT |
| Qwen-PI | Flow-Matching(확산 기반) 방식으로 연속 액션 생성 | pi0 |
| Qwen-GR00T | 이중 시스템: VLM으로 고수준 추론 + DiT로 빠른 액션 생성 | GR00T-N1 |
모듈화의 장점: Framework에서 모델 구조만 정의하면, 공유 Trainer, Dataloader, 평가/배포 파이프라인을 재사용할 수 있습니다. 학습 루프나 평가 코드를 새로 작성할 필요가 없습니다.
학습 전략
섹션 제목: “학습 전략”- 단일 태스크 모방 학습(사람의 시연으로부터 학습 — 보상 함수 불필요).
- 멀티모달 다중 태스크 공동 학습(여러 데이터 소스로 동시 학습하여 모델이 이전에 습득한 능력을 잊지 않도록 함).
- [계획 중] 강화 학습 적용.
시뮬레이션 벤치마크
섹션 제목: “시뮬레이션 벤치마크”지원 또는 계획 중인 벤치마크:
- 지원 중: SimplerEnv, LIBERO, RoboCasa, RoboTwin, CALVIN, BEHAVIOR.
- 계획 중: SO101, RLBench.
주요 벤치마크 결과
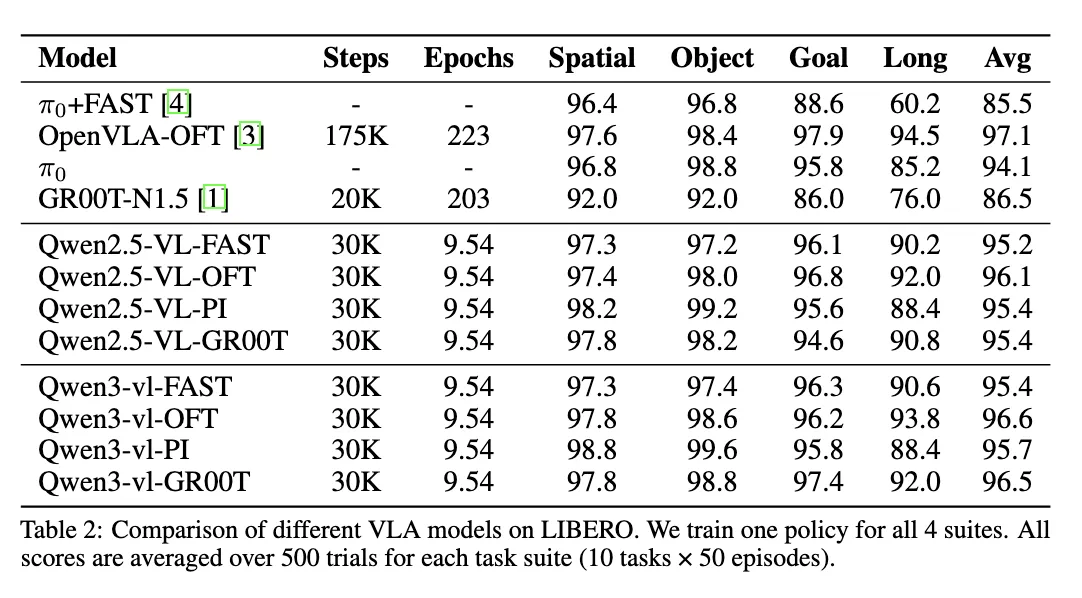
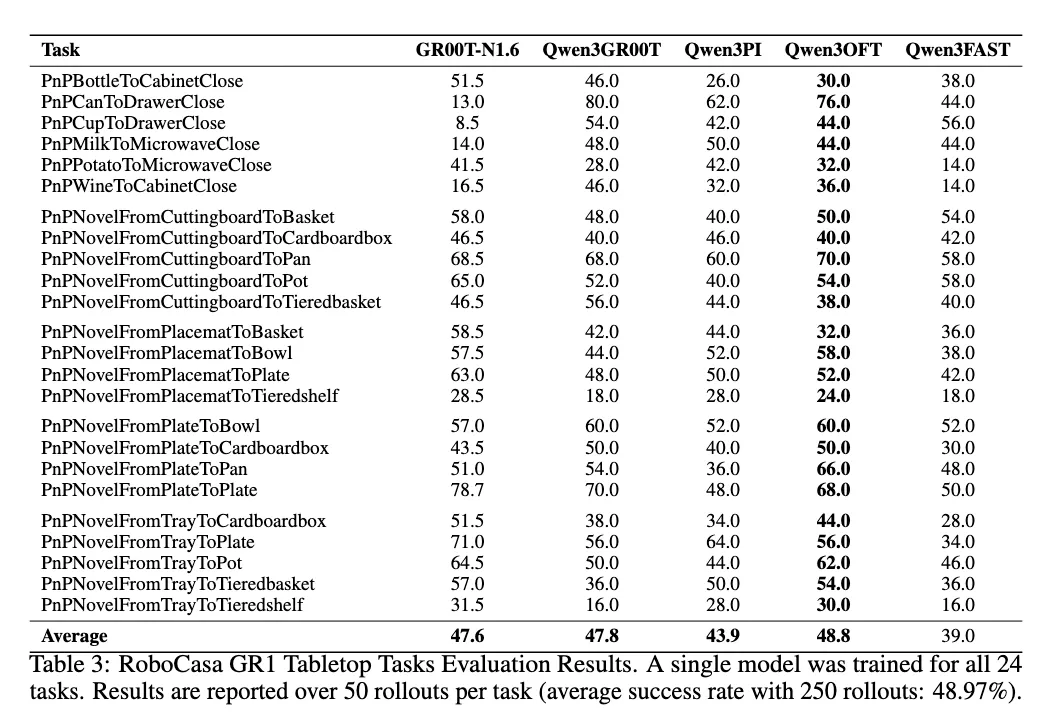
섹션 제목: “주요 벤치마크 결과”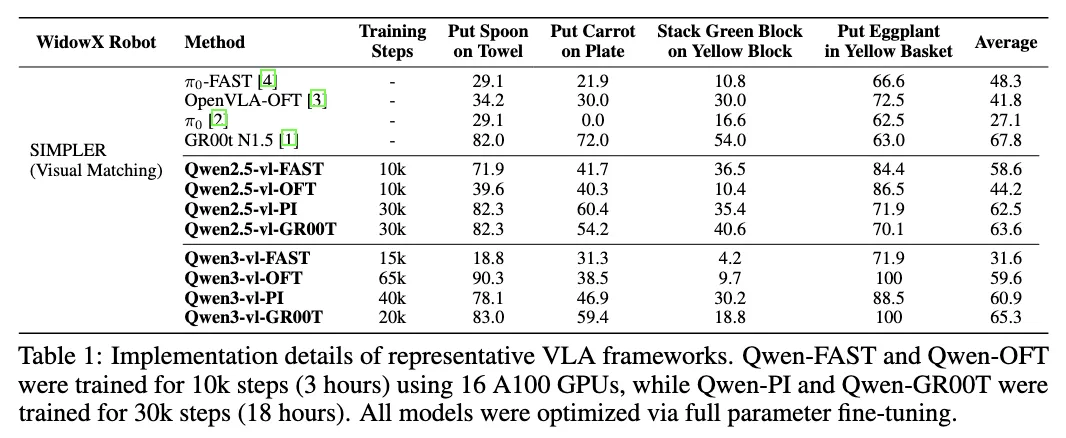
결과 및 리포트
섹션 제목: “결과 및 리포트”- 기술 보고서: StarVLA: A Lego-like Codebase for Vision-Language-Action Model Developing (arXiv:2604.05014).
- Overleaf 실시간 리포트: 최신 벤치마크 데이터와 분석이 포함된, 지속적으로 업데이트되는 실험 보고서 PDF — https://www.overleaf.com/read/qqtwrnprctkf#d5bdce
다음 단계
섹션 제목: “다음 단계”커뮤니티 및 링크
섹션 제목: “커뮤니티 및 링크”- Hugging Face: https://huggingface.co/StarVLA
- WeChat 그룹: https://github.com/starVLA/starVLA/issues/64#issuecomment-3715403845
StarVLA 기반 프로젝트:
- NeuroVLA: A Brain-like Embodied Intelligence for Fluid and Fast Reflexive Robotics Control
- PhysBrain: Human Egocentric Data as a Bridge from Vision Language Models to Physical Intelligence
- TwinBrainVLA: Unleashing the Potential of Generalist VLMs for Embodied Tasks via Asymmetric Mixture-of-Transformers
- LangForce: Bayesian Decomposition of Vision Language Action Models via Latent Action Queries
최근 업데이트
- 2025/12/25: Behavior-1K, RoboTwin 2.0, CALVIN 파이프라인 구축 완료; 커뮤니티와 베이스라인 공유 예정.
- 2025/12/25: RoboCasa 평가 지원 공개, 사전 학습 없이 SOTA 달성. RoboCasa 문서를 참조하세요.
- 2025/12/15: 릴리스 회귀 테스트 완료; 일일 개발 로그에서 업데이트를 확인할 수 있습니다.
- 2025/12/09: VLM, VLA, VLA+VLM 공동 학습을 위한 오픈소스 학습 코드 공개. VLM 공동 학습 문서를 참조하세요.
- 2025/11/12: 자원 제약 환경에서의 VLM 학습을 위한 Florence-2 지원 추가(단일 A100). 워크플로우 관련 사항은 레고 블록 설계를 참조하세요.
- 2025/10/30: LIBERO 학습 및 평가 가이드 공개.
- 2025/10/25: 커뮤니티 피드백을 반영하여 스크립트 링크 및 패키징 개선.